A Unified Objective for Novel Class Discovery
2. LTCI, Télécom Paris, Institut Polytechnique de Paris, France
3. SAP AI Research, Berlin, Germany
4. Fondazione Bruno Kessler, Trento, Italy
zhunzhong007@gmail.com m.nabi@sap.com e.ricci@unitn.it
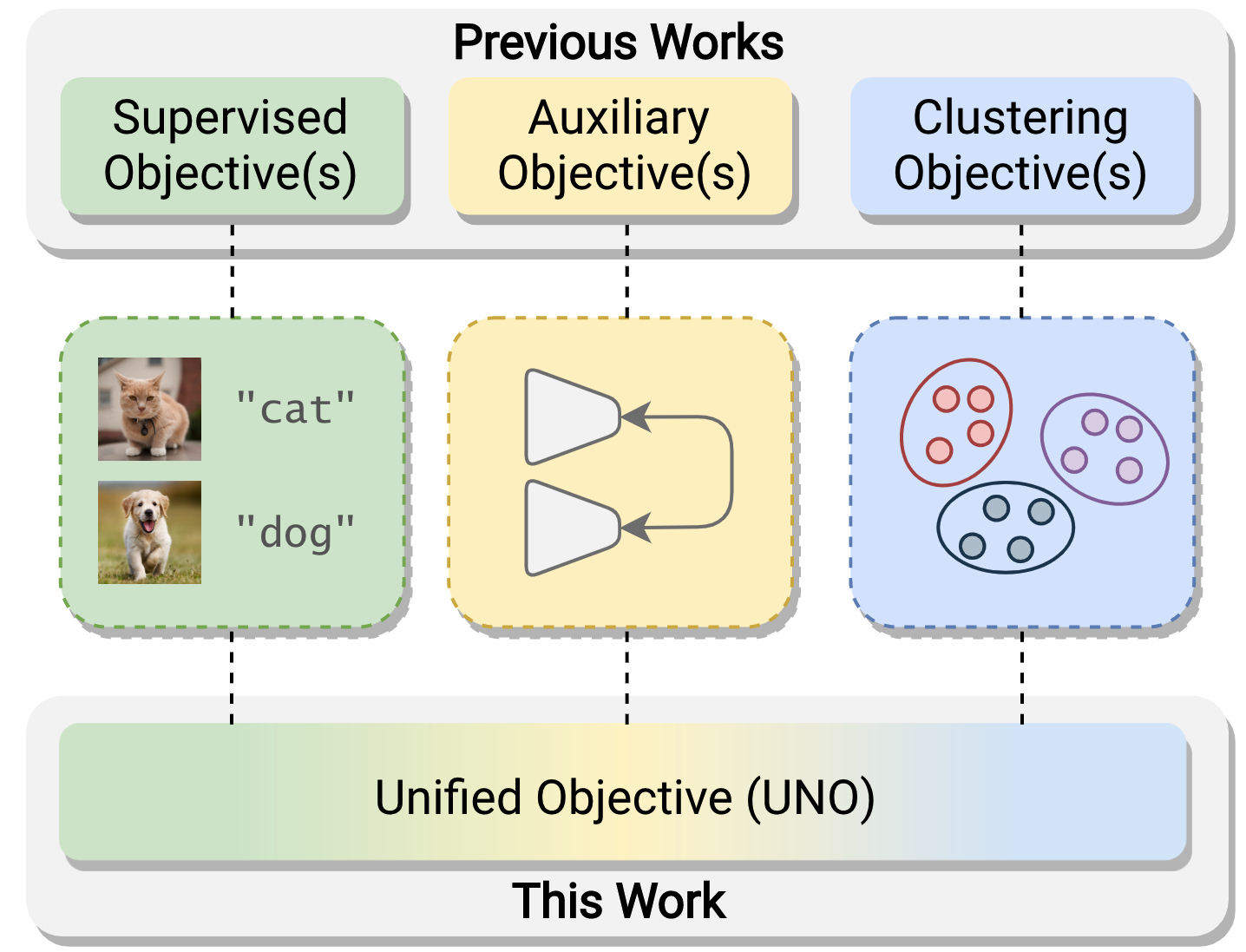
A visual comparison of our UNified Objective (UNO) with previous works.
Abstract
In this paper, we study the problem of Novel Class Discovery (NCD). NCD aims at inferring novel object categories in an unlabeled set by leveraging from prior knowledge of a labeled set containing different, but related classes. Existing approaches tackle this problem by considering multiple objective functions, usually involving specialized loss terms for the labeled and the unlabeled samples respectively, and often requiring auxiliary regularization terms. In this paper we depart from this traditional scheme and introduce a UNified Objective function (UNO) for discovering novel classes, with the explicit purpose of favoring synergy between supervised and unsupervised learning. Using a multi-view self-labeling strategy, we generate pseudo-labels that can be treated homogeneously with ground truth labels. This leads to a single classification objective operating on both known and unknown classes. Despite its simplicity, UNO outperforms the state of the art by a significant margin on several benchmarks (≈+10\% on CIFAR-100 and +8\% on ImageNet).
Method Overview
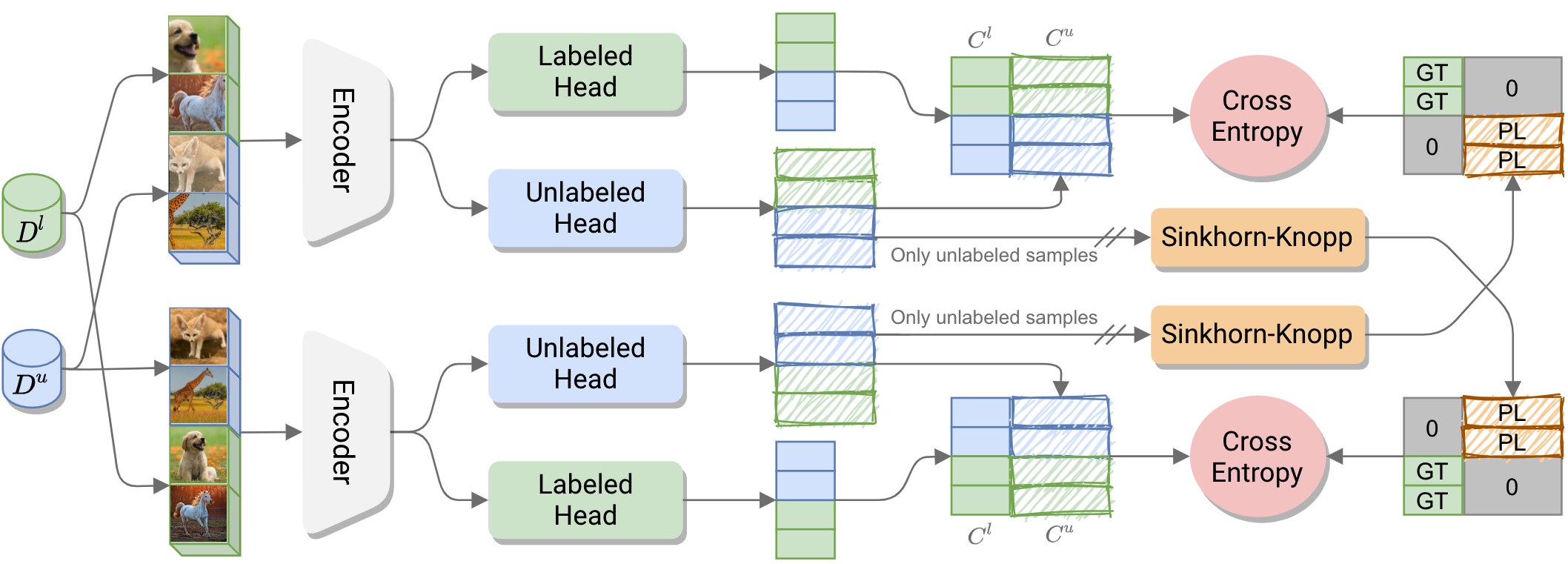
Overview of the proposed architecture.
Results
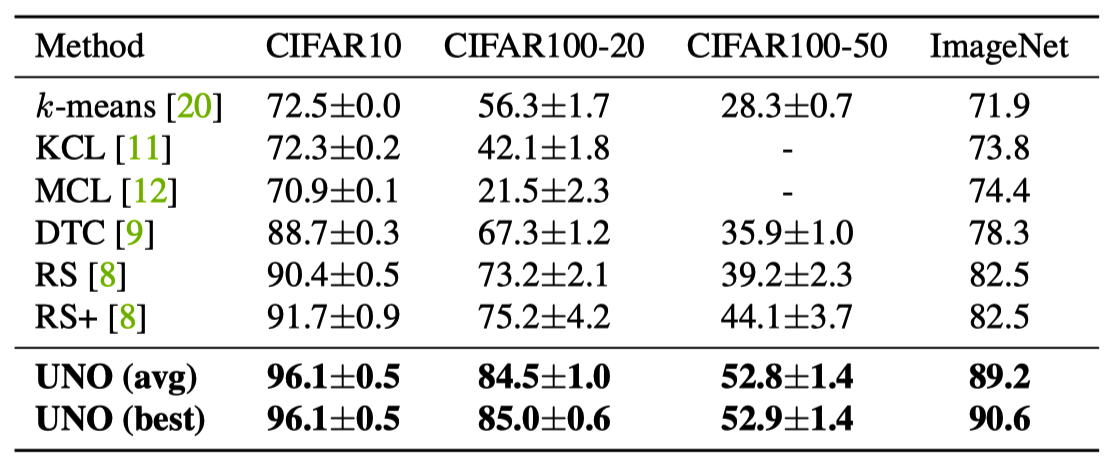
Comparison with state-of-the-art methods on CIFAR-10, CIFAR-100 and ImageNet for novel class discovery using task-aware evaluation protocol. Clustering accuracy is reported on the unlabeled set (training split). All methods except UNO initialize the encoder with self-supervised learning, except when evaluated on ImageNet. “RS+” is with incremental classifier.
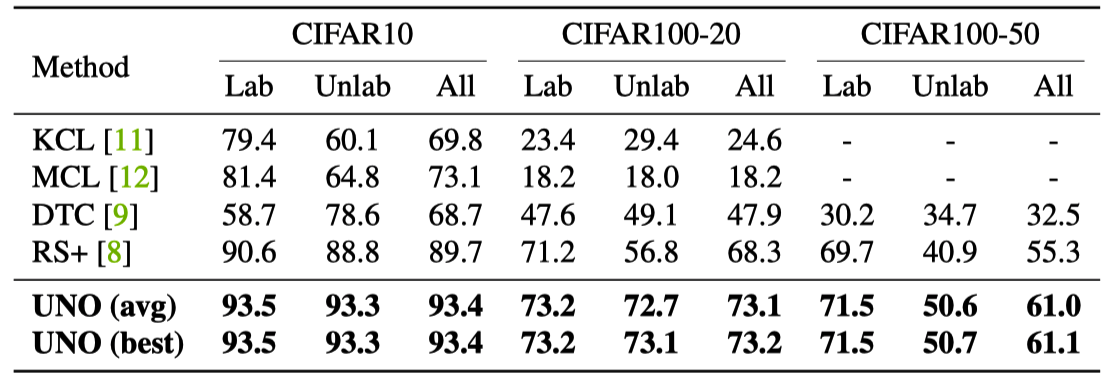
Comparison with state-of-the-art methods on CIFAR-10 and CIFAR-100 on both labeled and unlabeled classes, using task-agnostic evaluation protocol. Accuracy and clustering accuracy are reported on the test set.
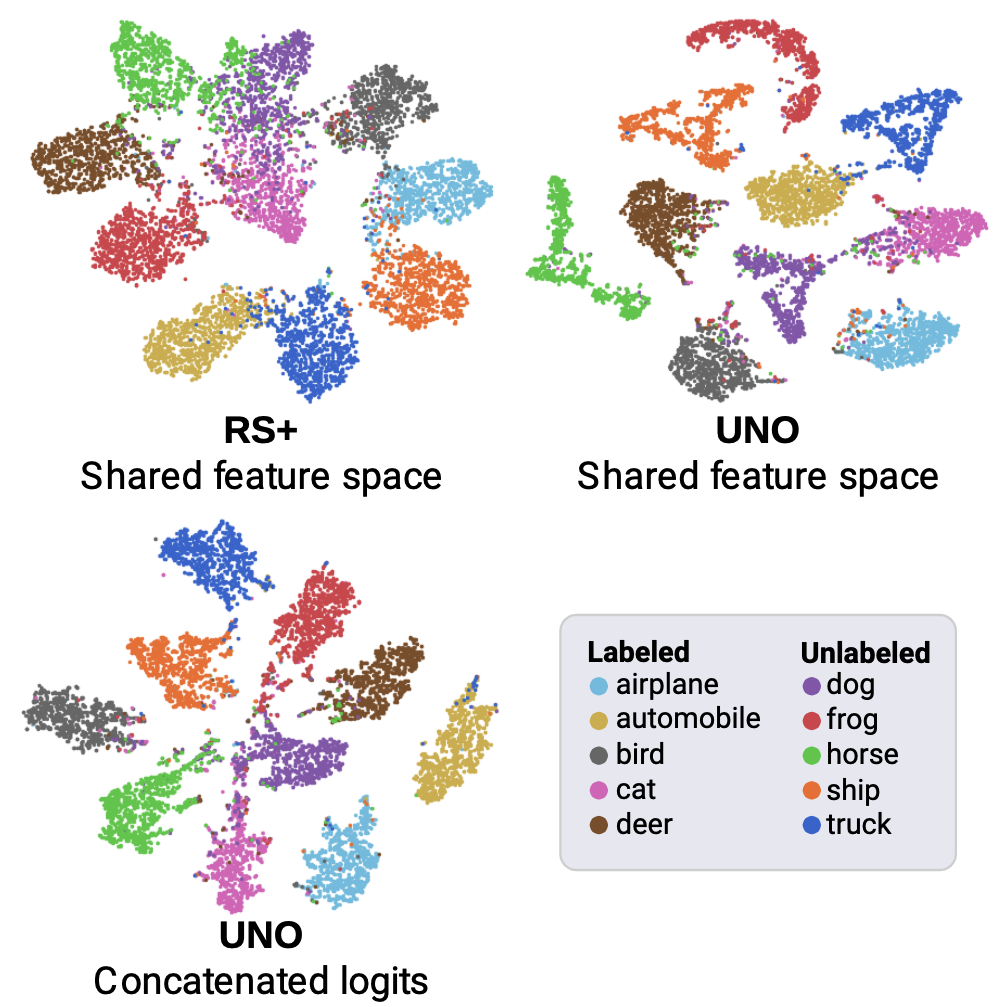
t-SNE visualization for all classes on CIFAR10. For both methods “Shared feature space” stands for the features after the last convolutional block.
Citation
@InProceedings{Fini_2021_ICCV,
author = {Fini, Enrico and Sangineto, Enver and Lathuilière, Stéphane and Zhong, Zhun and Nabi, Moin and Ricci, Elisa},
title = {A Unified Objective for Novel Class Discovery},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
year = {2021}
}